
Department Faculty
Our faculty are renowned leaders in their respective fields, extraordinary teachers, and dedicated mentors.
Home to world-class teaching and interdisciplinary research, the Department of Electrical and Computer Engineering prides itself on immersive education, creative problem-solving, and close mentorship, with emphasis on devices, system engineering, signal processing and machine learning.
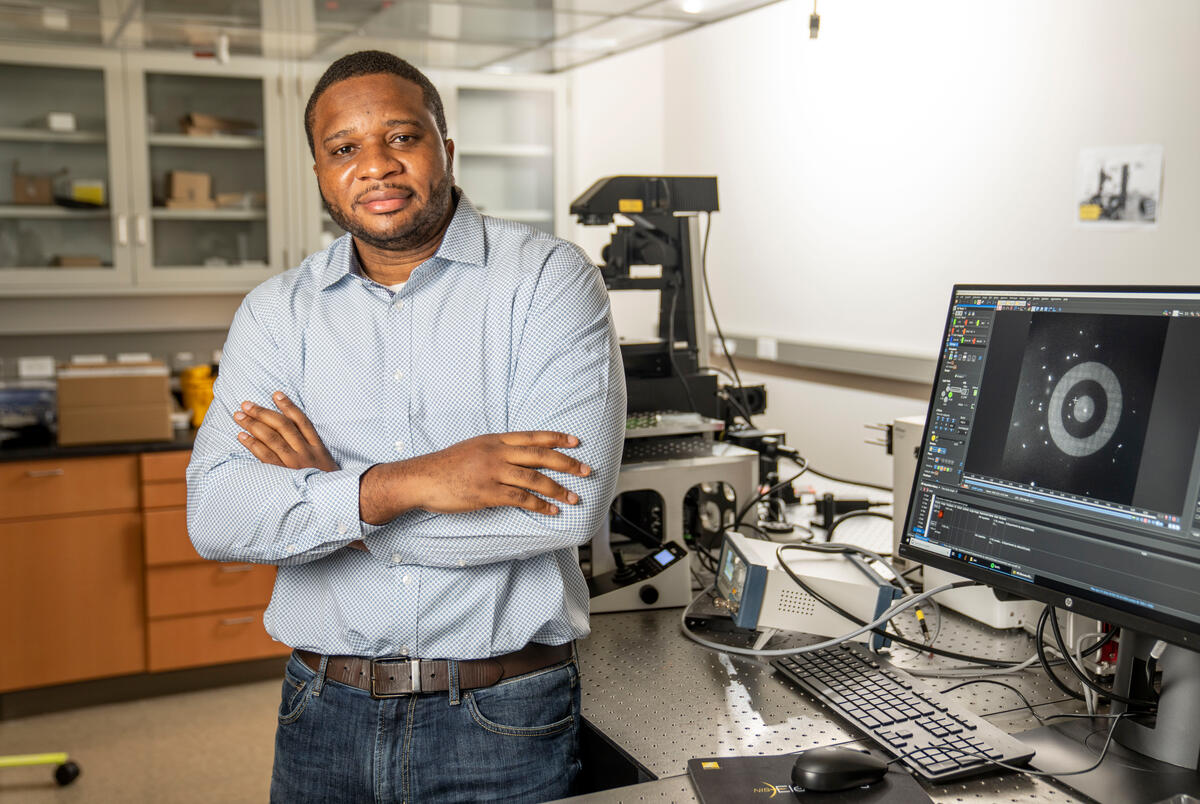
Vanderbilt researchers have developed a way to more quickly, and precisely, trap nanoscale objects such as potentially cancerous extracellular vesicles using a cutting-edge plasmonic nanotweezer.

 A shared passion for research and education is a hallmark of the Vanderbilt environment, and our undergraduate and graduate programs exemplify that drive for excellence. Faculty, research engineers and students engage in leading scholarship and significant research in both industry and government.
A shared passion for research and education is a hallmark of the Vanderbilt environment, and our undergraduate and graduate programs exemplify that drive for excellence. Faculty, research engineers and students engage in leading scholarship and significant research in both industry and government.
Electrical and computer engineering graduate students pursuing M.S. and Ph.D. degrees work with our accomplished faculty on high-impact research projects while gaining experience in specialized areas of interest. Focus areas include carbon, diamond and silicon nanotechnology, hybrid and embedded systems, medical image processing, photonics, radiation effects and reliability and robotics.
We offer an accredited electrical and computer engineering undergraduate major, a double-major in electrical and computer engineering and biomedical engineering, and a minor in electrical and computer engineering.
The immersive Senior Design Project brings together interdisciplinary teams of engineers to solve cutting-edge problems. Prior teams have gone on to start companies, lead to new industry products, and kickstart research careers. Summer research opportunities are also available in collaboration with the School of Engineering and the VUSE Undergraduate Summer Research Program. Additional opportunities are available in the NSF Research Experience for Undergraduates (REU) programs.


Benoit Dawant, Chair (Interim)
Tim Holman, Director of Undergraduate Studies
Alan Peters, Director of Graduate Studies
Jack Noble, Director of Graduate Recruiting
Department Administration Staff
Department of Electrical and Computer Engineering
Vanderbilt University
PMB 351824
2301 Vanderbilt Place
Nashville, TN 37235-1824